Все тела, обладающие массой, притягиваются друг к другу с силой, подчиняющейся закону всемирного тяготения И. Ньютона. Следовательно, притягивающиеся тела обладают энергией взаимодействия (рис. 160).
Рис. 160
Покажем, что работа гравитационных сил не зависит от формы траектории, то есть гравитационные силы также являются потенциальными. Для этого рассмотрим движение небольшого тела массой m
, взаимодействующего с другим массивным телом массой М
, которое будем полагать неподвижным 1 (рис. 161).
рис. 161
Как следует из закона Ньютона, сила F
, действующая между телами, направлена вдоль линии, соединяющей эти тела. Поэтому при движении тела m
по дуге окружности с центром в точке, где находится тело М
, работа гравитационной силы равна нулю, так как векторы сил и перемещения все время остаются взаимно перпендикулярными. При движении вдоль отрезка, направленного к центру тела М
, векторы перемещения и силы параллельны, поэтому в этом случае при сближении тел работа гравитационной силы положительна, а при удалении тел − отрицательна. Далее заметим, что при радиальном движении работа силы притяжения зависит только от начального и конечного расстояний между телами. Так, при движении по отрезкам (рис. 162) DE
и D 1 E 1
совершенные работы равны, так как законы изменения сил от расстояния на обоих отрезках одинаковы. Наконец, произвольную траекторию тела m
можно разбить на набор дуговых и радиальных участков (например, ломаная ABCDE
).
рис. 162
При движении по дугам работа равна нулю, при движении по радиальным отрезкам работа не зависит от положения этого отрезка, следовательно, работа гравитационной силы зависит только от начального и конечного расстояний между телами, что и требовалось доказать.
Заметьте, что при доказательстве потенциальности мы воспользовались только тем фактом, что гравитационные силы являются центральными, то есть направленными вдоль прямой, соединяющей тела, и не упоминали о конкретном виде зависимости силы от расстояния. Следовательно, все центральные силы являются потенциальными.
Мы доказали потенциальность силы гравитационного взаимодействия между двумя точечными телами. Но для гравитационных взаимодействий справедлив принцип суперпозиции: сила, действующая на тело со стороны системы точечных тел, равна сумме сил парных взаимодействий, каждая из которых является потенциальной, следовательно, и их сумма также потенциальна. Действительно, если работа каждой силы парного взаимодействия не зависит от траектории, то и их сумма также не зависит от формы траектории. Таким образом, все гравитационные силы потенциальны
.
Нам осталось получить конкретное выражение для потенциальной энергии гравитационного взаимодействия.
Для вычисления работы силы притяжения между двумя точечными телами достаточно подсчитать эту работу при движении вдоль радиального отрезка при изменении расстояния от r 1
до r 2
(рис. 163).
рис. 163
Очередной раз воспользуемся графическим методом, для чего построим зависимость силы притяжения F = GMm/r 2
от расстояния r между телами. Тогда площадь под графиком этой зависимости в указанных пределах и будет равна искомой работе (рис. 164).
рис. 164
Вычисление этой площади представляет собой не слишком сложную задачу, требующее, однако, определенных математических знаний и навыков. Не вдаваясь в детали этого расчета, приведем конечный результат: для данной зависимости силы от расстояния площадь под графиком, или работа силы притяжения, определяется формулой
А 12 = GMm(1/r 2 − 1/r 1)
.
Так как мы доказали, что гравитационные силы являются потенциальными, эта работа равна уменьшению потенциальной энергии взаимодействия, то есть
А 12 = GMm(1/r 2 − 1/r 1) = −ΔU = −(U 2 − U 1)
.
Из этого выражения можно определить выражение для потенциальной энергии гравитационного взаимодействия:
U(r) = −GMm/r
. (1)
При таком определении потенциальная энергия отрицательна и стремится к нулю при бесконечном расстоянии между телами: U(∞) = 0
. Формула (1) определяет работу, которую совершит сила гравитационного притяжения при увеличении расстояния от r
до бесконечности, а так как при таком движении векторы силы и перемещения направлены в противоположные стороны, то эта работа отрицательна. При противоположном движении, при сближении тел от бесконечного расстояния до расстояния r
, работа силы притяжения будет положительна. Эту работу можно подсчитать по определению потенциальной энергии:
Подчеркнем, что потенциальная энергия является характеристикой взаимодействия, по меньшей мере, двух тел. Нельзя говорить о том, что энергия взаимодействия «принадлежит» одному из тел, или каким образом «разделить эту энергию между телами». Поэтому когда мы говорим об изменении потенциальной энергии, мы подразумеваем изменение энергии системы взаимодействующих тел. Однако в некоторых случаях допустимо все же говорить об изменении потенциальной энергии одного тела. Так, при описании движения небольшого, по сравнению с Землей, тела в поле тяжести Земли говорим о силе, действующей на тело со стороны Земли, как правило, не упоминая и не учитывая равную силу, действующую со стороны тела на Землю. Дело в том, что при громадной массе Земли изменение ее скорости исчезающее мало. Поэтому изменение потенциальной энергии взаимодействия приводит к заметному изменению кинетической энергии тела и бесконечно малому изменению кинетической энергии Земли. В такой ситуации допустимо говорить о потенциальной энергии тела вблизи поверхности Земли, то есть всю энергию гравитационного взаимодействия «приписать» небольшому телу. В общем случае, можно говорить о потенциальной энергии отдельного тела, если остальные взаимодействующие тела неподвижны.
Мы неоднократно подчеркивали, что точка, в которой потенциальная энергия принимается равной нулю, выбирается произвольно. В данном случае такой точкой оказалась бесконечно удаленная точка. В некотором смысле этот непривычный вывод может быть признан разумным: действительно, на бесконечном расстоянии исчезает взаимодействие − исчезает и потенциальная энергия. С этой точки зрения логичным выглядит и знак потенциальной энергии. Действительно, чтобы разнести два притягивающиеся тела, внешние силы должны совершить положительную работу, поэтому в таком процессе потенциальная энергия системы должна возрастать: вот она возрастает, возрастает и... становится равной нулю!
Если притягивающиеся тела соприкасаются, то сила притяжения не может совершать положительную работу, если же тела разнесены, то такая работа может быть совершена при сближении тел. Поэтому часто говорят о том, что притягивающиеся тела обладают отрицательной энергией, а энергия отталкивающихся тел положительна. Это утверждение справедливо только в том случае, если нулевой уровень потенциальной энергии выбирается на бесконечности. Так, если два тела связаны пружиной, то при увеличении расстояния между телами между ними будет действовать сила притяжения, тем не менее, энергия их взаимодействия является положительной. Не забывайте, что нулевому уровню потенциальной энергии соответствует состояние недеформированной пружины (а не бесконечность).
1 Вспомните, что сила гравитационного взаимодействия между сферически симметричными телами эквивалентна силе взаимодействия между точечными телами таких же масс.
Потенциальная энергия гравитационного взаимодействия системы двух материальных точек с массами m и М , находящихся на расстоянии r одна от другой, равна
Ep =G ⋅M ⋅mr . (11)
где G – гравитационная постоянная, а нуль отсчета потенциальной энергии (Е p = 0) принят при r = ∞.
Потенциальная энергия гравитационного взаимодействия тела массой m с Землей, где h – высота тела над поверхностью Земли, M e – масса Земли, R e – радиус Земли, а нуль отсчета потенциальной энергии выбран при h = 0.
Ee =G ⋅Me ⋅m ⋅hRe ⋅(Re +h ) . (12)
При том же условии выбора нуля отсчета потенциальная энергия гравитационного взаимодействия тела массой m с Землей для малых высот h (h « R e) равна
Ep =m ⋅g ⋅h ,
где g =G ⋅MeR 2e – модуль ускорения свободного падения вблизи поверхности Земли.
Первая и вторая космические скорости.
Первая космическая скорость
Это скорость физического объекта, с которой он может вращаться вокруг Земли, не падая на нее и не отрываясь в пространство. Первая космическая скорость обеспечивает равновесное положение тела, движущегося по круговой траектории вблизи поверхности Земли. При отсутствии тормозящих факторов такое движение может продолжаться бесконечно долго. При этом масса самого вращающегося объекта значения не имеет, а радиус окружности вращения должен немного превышать радиус Земли.
Первая космическая скорость = 7,91 км/с
Итак, первая космическая скорость эти минимальная линейная скорость объекта, движущегося по окружности вокруг Земли, которая позволяет ему не падать и не улетать в пространство.
Вторая космическая скорость
Это минимальная скорость, при достижении которой объект, движущийся по вращательной орбите вокруг Земли, может преодолеть силу притяжения планеты и улететь в пространство. Её еще называют скоростью убегания.
Вторая космическая скорость также как и первая, определяется радиусом и массой небесного тела. Для каждого небесного тела она своя, для планеты Земля равна 11,18 км/с над поверхностью Земли. Достигнув такой скорости, тело отрывается от притяжения Земли и попадает в гравитационное поле Солнца, становясь его спутником.
Вторая космическая скорость = 11,18 км/с
Это минимальная скорость, при достижении которой объект, движущийся по вращательной орбите вокруг Земли, может преодолеть силу притяжения планеты и улететь в пространство.
Абсолютно неупругий удар.
Абсолю́тно неупру́гий удар - удар, в результате которого компоненты скоростей тел, нормальные площадке касания, становятся равными. Если удар был центральным (скорости были перпендикулярны касательной плоскости), то тела соединяются и продолжают дальнейшее своё движение как единое тело.
Где v это общая скорость тел, полученная после удара, m a - масса первого тела, u a - скорость первого тела до соударения. m b - масса второго тела, u b -скорость второго тела до соударения. Важно - импульсы являются величинами векторными, поэтому складываются только векторно.
![]()
Как и при любом ударе, при этом выполняются закон сохранения импульса и закон сохранения момента импульса , но не выполняется закон сохранения механической энергии . Часть кинетической энергии соударяемых тел в результате неупругих деформаций переходит в тепловую .
Хорошая модель абсолютно неупругого удара - сталкивающиеся пластилиновые шарики
Абсолютно упругий удар.
Абсолютно упругий удар -модель соударения, при которой полная кинетическая энергия системы сохраняется. В классической механике при этом пренебрегают деформациями тел. Соответственно, считается, что энергия на деформации не теряется, а взаимодействие распространяется по всему телу мгновенно.
Для математического описания простейших абсолютно упругих ударов используется закон сохранения энергии и закон сохранения импульса .
Здесь m 1 , m 2 - массы первого и второго тел. u 1 , v 1 - скорость первого тела до, и после взаимодействия. u 2 , v 2 - скорость второго тела до, и после взаимодействия.
Важно - импульсы складываются векторно, а энергии скалярно.
Динамика вращательного движения.
Вращательным движением тела вокруг фиксированной оси называют движение, при котором произвольная точка тела, кроме тех, что лежат на оси вращения, движется по окружности в плоскости, перпендикулярной оси вращения, с центром, лежащим на этой оси.
Равноускоренное вращательное движение - это движение по окружности, при котором угловая скорость тела за каждые равные отрезки времени изменяется на одно и тоже значение.
Момент инерции. Теорема Штейнера о переносе полей
Моме́нт ине́рции - скалярная (в общем случае - тензорная ) физическая величина , мера инертности во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении. Характеризуется распределением масс в теле: момент инерции равен сумме произведений элементарных масс на квадрат их расстояний до базового множества (точки, прямой или плоскости).
Единица измерения в Международной системе единиц (СИ) : кг ·м ².
Обозначение: I или J .
Энергией называется скалярная физическая величина, являющаяся единой мерой различных форм движения материи и мерой перехода движения материи из одних форм в другие.
Для характеристики различных форм движения материи вводятся соответствующие виды энергии, например: механическая, внутренняя, энергия электростатических, внутриядерных взаимодействий и др.
Энергия подчиняется закону сохранения, который является одним из важнейших законов природы.
Механическая энергия Е характеризует движение и взаимодействие тел и является функцией скоростей и взаимного расположения тел. Она равна сумме кинетической и потенциальной энергий.
Кинетическая энергия
Рассмотрим случай, когда на тело массой m действует постоянная сила \(~\vec F\) (она может быть равнодействующей нескольких сил) и векторы силы \(~\vec F\) и перемещения \(~\vec s\) направлены вдоль одной прямой в одну сторону. В этом случае работу силы можно определить как A = F ∙s . Модуль силы по второму закону Ньютона равен F = m∙a , а модуль перемещения s при равноускоренном прямолинейном движении связан с модулями начальной υ 1 и конечной υ 2 скорости и ускорения а выражением \(~s = \frac{\upsilon^2_2 - \upsilon^2_1}{2a}\) .
Отсюда для работы получаем
\(~A = F \cdot s = m \cdot a \cdot \frac{\upsilon^2_2 - \upsilon^2_1}{2a} = \frac{m \cdot \upsilon^2_2}{2} - \frac{m \cdot \upsilon^2_1}{2}\) . (1)
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела .
Кинетическая энергия обозначается буквой E k .
\(~E_k = \frac{m \cdot \upsilon^2}{2}\) . (2)
Тогда равенство (1) можно записать в таком виде:
\(~A = E_{k2} - E_{k1}\) . (3)
Теорема о кинетической энергии
работа равнодействующей сил, приложенных к телу, равна изменению кинетической энергии тела.
Так как изменение кинетической энергии равно работе силы (3), кинетическая энергия тела выражается в тех же единицах, что и работа, т. е. в джоулях.
Если начальная скорость движения тела массой m равна нулю и тело увеличивает свою скорость до значения υ , то работа силы равна конечному значению кинетической энергии тела:
\(~A = E_{k2} - E_{k1}= \frac{m \cdot \upsilon^2}{2} - 0 = \frac{m \cdot \upsilon^2}{2}\) . (4)
Физический смысл кинетической энергии
кинетическая энергия тела, движущегося со скоростью υ, показывает, какую работу должна совершить сила, действующая на покоящееся тело, чтобы сообщить ему эту скорость.
Потенциальная энергия
Потенциальная энергия – это энергия взаимодействия тел.
Потенциальная энергия поднятого над Землей тела – это энергия взаимодействия тела и Земли гравитационными силами. Потенциальная энергия упруго деформированного тела – это энергия взаимодействия отдельных частей тела между собой силами упругости.
Потенциальными называются силы , работа которых зависит только от начального и конечного положения движущейся материальной точки или тела и не зависит от формы траектории.
При замкнутой траектории работа потенциальной силы всегда равна нулю. К потенциальным силам относятся силы тяготения, силы упругости, электростатические силы и некоторые другие.
Силы , работа которых зависит от формы траектории, называются непотенциальными . При перемещении материальной точки или тела по замкнутой траектории работа непотенциальной силы не равна нулю.
Потенциальная энергия взаимодействия тела с Землей
Найдем работу, совершаемую силой тяжести F т при перемещении тела массой m вертикально вниз с высоты h 1 над поверхностью Земли до высоты h 2 (рис. 1). Если разность h 1 – h 2 пренебрежимо мала по сравнению с расстоянием до центра Земли, то силу тяжести F т во время движения тела можно считать постоянной и равной mg .
Так как перемещение совпадает по направлению с вектором силы тяжести, работа силы тяжести равна
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (5)
Рассмотрим теперь движение тела по наклонной плоскости. При перемещении тела вниз по наклонной плоскости (рис. 2) сила тяжести F т = m∙g совершает работу
\(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
где h – высота наклонной плоскости, s – модуль перемещения, равный длине наклонной плоскости.

Движение тела из точки В в точку С по любой траектории (рис. 3) можно мысленно представить состоящим из перемещений по участкам наклонных плоскостей с различными высотами h ’, h ’’ и т. д. Работа А силы тяжести на всем пути из В в С равна сумме работ на отдельных участках пути:
\(~A = m \cdot g \cdot h" + m \cdot g \cdot h"" + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h" + h"" + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\) , (7)
где h 1 и h 2 – высоты от поверхности Земли, на которых расположены соответственно точки В и С .

Равенство (7) показывает, что работа силы тяжести не зависит от траектории движения тела и всегда равна произведению модуля силы тяжести на разность высот в начальном и конечном положениях.
При движении вниз работа силы тяжести положительна, при движении вверх – отрицательна. Работа силы тяжести на замкнутой траектории равна нулю.
Равенство (7) можно представить в таком виде:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
Физическую величину, равную произведению массы тела на модуль ускорения свободного падения и на высоту, на которую поднято тело над поверхностью Земли, называют потенциальной энергией взаимодействия тела и Земли.
Работа силы тяжести при перемещении тела массой m из точки, расположенной на высоте h 2 , в точку, расположенную на высоте h 1 от поверхности Земли, по любой траектории равна изменению потенциальной энергии взаимодействия тела и Земли, взятому с противоположным знаком.
\(~A = - (E_{p2} - E_{p1})\) . (9)
Потенциальная энергия обозначается буквой Е p .
Значение потенциальной энергии тела, поднятого над Землей, зависит от выбора нулевого уровня, т. е. высоты, на которой потенциальная энергия принимается равной нулю. Обычно принимают, что потенциальная энергия тела на поверхности Земли равна нулю.
При таком выборе нулевого уровня потенциальная энергия Е p тела, находящегося на высоте h над поверхностью Земли, равна произведению массы m тела на модуль ускорения свободного падения g и расстояние h его от поверхности Земли:
\(~E_p = m \cdot g \cdot h\) . (10)
Физический смысл потенциальной энергии взаимодействия тела с Землей
потенциальная энергия тела, на которое действует сила тяжести, равна работе, совершаемой силой тяжести при перемещении тела на нулевой уровень.
В отличие от кинетической энергии поступательного движения, которая может иметь лишь положительные значения, потенциальная энергия тела может быть как положительной, так и отрицательной. Тело массой m , находящееся на высоте h , где h < h 0 (h 0 – нулевая высота), обладает отрицательной потенциальной энергией:
\(~E_p = -m \cdot g \cdot h\) .
Потенциальная энергия гравитационного взаимодействия
Потенциальная энергия гравитационного взаимодействия системы двух материальных точек с массами m и М , находящихся на расстоянии r одна от другой, равна
\(~E_p = G \cdot \frac{M \cdot m}{r}\) . (11)
где G – гравитационная постоянная, а нуль отсчета потенциальной энергии (Е p = 0) принят при r = ∞.
Потенциальная энергия гравитационного взаимодействия тела массой m с Землей, где h – высота тела над поверхностью Земли, M e – масса Земли, R e – радиус Земли, а нуль отсчета потенциальной энергии выбран при h = 0.
\(~E_e = G \cdot \frac{M_e \cdot m \cdot h}{R_e \cdot (R_e +h)}\) . (12)
При том же условии выбора нуля отсчета потенциальная энергия гравитационного взаимодействия тела массой m с Землей для малых высот h (h « R e) равна
\(~E_p = m \cdot g \cdot h\) ,
где \(~g = G \cdot \frac{M_e}{R^2_e}\) – модуль ускорения свободного падения вблизи поверхности Земли.
Потенциальная энергия упруго деформированного тела
Вычислим работу, совершаемую силой упругости при изменении деформации (удлинения) пружины от некоторого начального значения x 1 до конечного значения x 2 (рис. 4, б, в).

Сила упругости изменяется в процессе деформации пружины. Для нахождения работы силы упругости можно взять среднее значение модуля силы (т.к. сила упругости линейно зависит от x ) и умножить на модуль перемещения:
\(~A = F_{upr-cp} \cdot (x_1 - x_2)\) , (13)
где \(~F_{upr-cp} = k \cdot \frac{x_1 - x_2}{2}\) . Отсюда
\(~A = k \cdot \frac{x_1 - x_2}{2} \cdot (x_1 - x_2) = k \cdot \frac{x^2_1 - x^2_2}{2}\) или \(~A = -\left(\frac{k \cdot x^2_2}{2} - \frac{k \cdot x^2_1}{2} \right)\) . (14)
Физическая величина, равная половине произведения жесткости тела на квадрат его деформации, называется потенциальной энергией упруго деформированного тела:
\(~E_p = \frac{k \cdot x^2}{2}\) . (15)
Из формул (14) и (15) следует, что работа силы упругости равна изменению потенциальной энергии упруго деформированного тела, взятому с противоположным знаком:
\(~A = -(E_{p2} - E_{p1})\) . (16)
Если x 2 = 0 и x 1 = х , то, как видно из формул (14) и (15),
\(~E_p = A\) .
Физический смысл потенциальной энергии деформированного тела
потенциальная энергия упруго деформированного тела равна работе, которую совершает сила упругости при переходе тела в состояние, в котором деформация равна нулю.
Потенциальная энергия характеризует взаимодействующие тела, а кинетическая энергия – движущиеся тела. И потенциальная, и кинетическая энергия изменяются только в результате такого взаимодействия тел, при котором действующие на тела силы совершают работу, отличную от нуля. Рассмотрим вопрос об изменениях энергии при взаимодействиях тел, образующих замкнутую систему.
Замкнутая система – это система, на которую не действуют внешние силы или действие этих сил скомпенсировано . Если несколько тел взаимодействуют между собой только силами тяготения и силами упругости и никакие внешние силы на них не действуют, то при любых взаимодействиях тел работа сил упругости или сил тяготения равна изменению потенциальной энергии тел, взятому с противоположным знаком:
\(~A = -(E_{p2} - E_{p1})\) . (17)
По теореме о кинетической энергии, работа тех же сил равна изменению кинетической энергии:
\(~A = E_{k2} - E_{k1}\) . (18)
Из сравнения равенств (17) и (18) видно, что изменение кинетической энергии тел в замкнутой системе равно по абсолютному значению изменению потенциальной энергии системы тел и противоположно ему по знаку:
\(~E_{k2} - E_{k1} = -(E_{p2} - E_{p1})\) или \(~E_{k1} + E_{p1} = E_{k2} + E_{p2}\) . (19)
Закон сохранения энергии в механических процессах :
сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой силами тяготения и си-лами упругости, остается постоянной.
Сумма кинетической и потенциальной энергии тел называется полной механической энергией .
Приведем простейший опыт. Подбросим вверх стальной шарик. Сообщив начальную скорость υ нач, мы придадим ему кинетическую энергию, из-за чего он начнет подниматься вверх. Действие силы тяжести приводит к уменьшению скорости шарика, а значит, и его кинетической энергии. Но шарик поднимается выше и выше и приобретает все больше и больше потенциальной энергии (Е p = m∙g∙h ). Таким образом, кинетическая энергия не исчезает бесследно, а происходит ее превращение в потенциальную энергию.
В момент достижения верхней точки траектории (υ = 0) шарик полностью лишается кинетической энергии (Е k = 0), но при этом его потенциальная энергия становится максимальной. Дальше шарик меняет направление движения и с увеличивающейся скоростью движется вниз. Теперь происходит обратное превращение потенциальной энергии в кинетическую.
Закон сохранения энергии раскрывает физический смысл понятия работы :
работа сил тяготения и сил упругости, с одной стороны, равна увеличению кинетической энергии, а с другой стороны, – уменьшению потенциальной энергии тел. Следовательно, работа равна энергии, превратившейся из одного вида в другой.
Закон об изменении механической энергии
Если система взаимодействующих тел не замкнута, то ее механическая энергия не сохраняется. Изменение механической энергии такой системы равно работе внешних сил:
\(~A_{vn} = \Delta E = E - E_0\) . (20)
где Е и Е 0 – полные механические энергии системы в конечном и начальном состояниях соответственно.
Примером такой системы может служить система, в которой наряду с потенциальными силами действуют непотенциальные силы. К непотенциальным силам относятся силы трения. В большинстве случаев, когда угол между силой трения F r тела составляет π радиан, работа силы трения отрицательна и равна
\(~A_{tr} = -F_{tr} \cdot s_{12}\) ,
где s 12 – путь тела между точками 1 и 2.
Силы трения при движении системы уменьшают ее кинетическую энергию. В результате этого механическая энергия замкнутой неконсервативной системы всегда уменьшается, переходя в энергию немеханических форм движения.
Например, автомобиль, двигавшийся по горизонтальному участку дороги, после выключения двигателя проходит некоторый путь и под действием сил трения останавливается. Кинетическая энергия поступательного движения автомобиля стала равной нулю, а потенциальная энергия не увеличилась. Во время торможения автомобиля произошло нагревание тормозных колодок, шин автомобиля и асфальта. Следовательно, в результате действия сил трения кинетическая энергия автомобиля не исчезла, а превратилась во внутреннюю энергию теплового движения молекул.
Закон сохранения и превращения энергии
при любых физических взаимодействиях энергия превращается из одной формы в другую.
Иногда угол между силой трения F tr и элементарным перемещением Δr равен нулю и работа силы трения положительна:
\(~A_{tr} = F_{tr} \cdot s_{12}\) ,
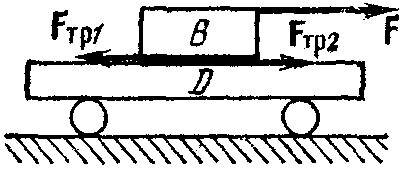
Пример 1 . Пусть, внешняя сила F действует на брусок В , который может скользить по тележке D (рис. 5). Если тележка перемещается вправо, то работа силы трения скольжения F tr2 , действующей на тележку со стороны бруска, положительна:
Пример 2 . При качении колеса его сила трения качения направлена вдоль движения, так как точка соприкосновения колеса с горизонтальной поверхностью двигается в направлении, противоположном направлению движения колеса, и работа силы трения положительна (рис. 6):

Литература
- Кабардин О.Ф. Физика: Справ. материалы: Учеб. пособие для учащихся. – М.: Просвещение, 1991. – 367 с.
- Кикоин И.К., Кикоин А.К. Физика: Учеб. для 9 кл. сред. шк. – М.: Про-свещение, 1992. – 191 с.
- Элементарный учебник физики: Учеб. пособие. В 3 т. / Под ред. Г.С. Ландсберга: т. 1. Механика. Теплота. Молекулярная физика. – М.: Физматлит, 2004. – 608 с.
- Яворский Б.М., Селезнев Ю.А. Справочное руководство по физике для поступающих в вузы и самообразования. – М.: Наука, 1983. – 383 с.
> Гравитационная потенциальная энергия
Что такое гравитационная энергия: потенциальная энергия гравитационного взаимодействия, формула для гравитационной энергии и закон всемирного тяготения Ньютона.
Гравитационная энергия – потенциальная энергия, связанная с гравитационной силой.
Задача обучения
- Вычислить гравитационную потенциальную энергию для двух масс.
Основные пункты
Термины
- Потенциальная энергия – энергия объекта в его позиции или химическом состоянии.
- Затон тяготения Ньютона – каждая точечная вселенская масса притягивает другую при помощи силы, выступающей прямо пропорциональной их массам и обратно пропорциональной квадрату их дистанции.
- Сила тяжести – результирующая сила наземной поверхности, притягивающая объекты к центру. Создается вращением.
Пример
Какой будет гравитационная потенциальная энергия 1-килограммовой книги на высоте в 1 м? Так как положение установлено близко к земной поверхности, то гравитационное ускорение будет постоянным (g = 9.8 м/с 2), а энергия гравитационного потенциала (mgh) достигает 1 кг ⋅ 1 м ⋅ 9.8 м/с 2 . Это можно проследить и в формуле:
Если добавить массу и земной радиус.
Гравитационная энергия отображает собою потенциальную, связанную с силой гравитации, потому что необходимо преодолеть земное притяжение, чтобы выполнить работу над поднятием предметов. Если объект падает от одной точки к другой внутри гравитационного поля, то сила тяжести выполнит положительную работу, а гравитационная потенциальная энергия уменьшится на ту же величину.
Допустим у нас есть книга, оставленная на столе. Когда мы переносим ее с пола на вершину стола, определенное внешнее вмешательство работает против гравитационной силы. Если же она упадет, то это работа гравитации. Поэтому процесс падения отображает потенциальную энергию, ускоряющую массу книгу и трансформирующуюся в кинетическую. Как только книга коснется пола, кинетическая энергия станет теплом и звуком.
На гравитационную потенциальную энергию влияют высота относительно конкретной точки, масса и сила гравитационного поля. Так что книга на столе уступает по гравитационной потенциальной энергии более тяжелой книга, расположенной ниже. Запомните, что высота не может применяться в вычислении гравитационной потенциальной энергии, если гравитация не выступает постоянной.
Локальное приближение
На силу гравитационного поля влияет расположение. Если изменение дистанции незначительное, то им можно пренебречь, а силу тяжести сделать постоянной (g = 9.8 м/с 2). Тогда для вычисления используем простую формулу: W = Fd. Восходящая сила приравнивается к весу, поэтому работа соотносится с mgh, выливающихся в формуле: U = mgh (U – потенциальная энергия, m – масса объекта, g – ускорение силы тяжести, h – высота объекта). Значение выражается в джоулях. Изменение потенциальной энергии передается как
Общая формула
Однако, если мы сталкиваемся с серьезными переменами в дистанции, то g не может оставаться постоянной и приходится применять исчисление и математическое определение работы. Чтобы рассчитать потенциальную энергию, можно интегрировать гравитационную силу относительно дистанции между телами. Тогда получим формулу гравитационной энергии:

U = -G + K, где К – постоянная интегрирования и приравнивается к нулю. Здесь потенциальная энергия превращается в ноль, когда r – бесконечна.

| Введение в равномерное круговое движение и гравитацию | |||||
| Неравномерное круговое движение | |||||
| Скорость, ускорение и сила | |||||
| Типы сил в природе | |||||
| Закон универсальной гравитации Ньютона | |||||
| Законы Кеплера | |||||
| Гравитационно потенциальная энергия | |||||
| Энергосбережение | |||||
| Угловые и линейные величины | |||||
Если в системе действуют только консервативные силы, то можно ввести понятие потенциальной энергии. Пусть тело массой m находит-
ся в гравитационном поле Земли, масса которой M . Сила взаимодей- ствия между ними определяется законом Всемирного тяготения
F (r ) = G Mm ,
где G = 6,6745 (8) × 10–11 м3/(кг× с2) - гравитационная постоянная; r - расстояние между их центрами масс. Подставляя выражение для гра- витационной силы в формулу (3.33), найдем ее работу при переходе тела из точки с радиус-вектором r 1 в точку с радиус-вектором r 2
r 2 dr
|
= GMm ⎜⎝r
1 r 1 r 1 2 2 1
Представим соотношение (3.34) в виде разности значений
A 12 = U (r 1) – U (r 2), (3.35)
U (r ) = -G Mm + C
для различных значений расстояний r 1 и r 2. В последней формуле C - произвольная константа.
Если тело приближается к Земле, которая считается неподвижной , то r 2 < r 1, 1/ r 2 – 1/ r 1 > 0 и A 12 > 0, U (r 1) > U (r 2). В этом случае сила тя- жести совершает положительную работу. Тело переходит из некото- рого начального состояния, которое характеризуется значением U (r 1) функции (3.36), в конечное, с меньшим значением U (r 2).
Если же тело удаляется от Земли, то r 2 > r 1, 1/ r 2 – 1/ r 1 < 0 и A 12 < 0,
U (r 1) < U (r 2), т. е сила тяготения совершает отрицательную работу.
Функция U = U (r ) является математическим выражением способ- ности гравитационных сил, действующих в системе, совершать ра- боту и согласно данному выше определению представляет собой по- тенциальную энергию.
Отметим, что потенциальная энергия обусловлена взаимным тя- готением тел и является характеристикой системы тел, а не одного тела. Однако при рассмотрении двух или большего числа тел одно из них (обычно Земля) считается неподвижным, а другие движутся от- носительно него. Поэтому часто говорят о потенциальной энергии именно этих тел в поле сил неподвижного тела.
Поскольку в задачах механики представляет интерес не величина потенциальной энергии, а ее изменение, то значение потенциальной энергии можно отсчитывать от любого начального уровня. Послед- нее определяет значение константы в формуле (3.36).
U (r ) = -G Mm .
Пусть нулевой уровень потенциальной энергии соответствует по- верхности Земли, т. е. U (R ) = 0, где R – радиус Земли. Запишем фор- мулу (3.36) для потенциальной энергии при нахождении тела на вы- соте h над ее поверхностью в следующей форме
U (R + h ) = -G Mm
R + h
+ C . (3.37)
Полагая в последней формуле h = 0, имеем
U (R ) = -G Mm + C .
Отсюда найдем значение константы C в формулах (3.36, 3.37)
C = -G Mm .
После подстановки значения константы C в формулу (3.37), имеем
U (R + h ) = -G Mm + G Mm = GMm ⎛- 1
1 ⎞= G Mm h .
R + h R
⎝⎜ R + h R ⎟⎠ R (R + h )
Перепишем эту формулу в виде
U (R + h ) = mgh h ,
где gh
R (R + h )
Ускорение свободного падения тела на высоте
h над поверхностью Земли.
В приближении h « R получаем известное выражение для потен- циальной энергии, если тело находится на небольшой высоте h над поверхностью Земли
Где g = G M
U (h ) = mgh , (3.38)
Ускорение свободного падения тела вблизи Земли.
В выражении (3.38) принята более удобная запись: U (R + h ) = U (h ). Из него видно, что потенциальная энергия равна работе, которую со- вершает гравитационная сила при перемещении тела с высоты h над
Землей на ее поверхность, соответствующую нулевому уровню по- тенциальной энергии. Последнее служит основанием считать выра- жение (3.38) потенциальной энергией тела над поверхностью Земли, говорить о потенциальной энергии тела и исключить из рассмотре- ния второе тело - Землю.
Пусть тело массой m находится на поверхности Земли. Для того чтобы оно оказалось на высоте h над этой поверхностью, к телу не- обходимо приложить внешнюю силу, противоположно направлен- ную силе тяжести и бесконечно мало отличающуюся от нее по мо- дулю. Работа, которую совершит внешняя сила, определяется сле- дующим соотношением:
R + h
R + h dr
⎡1 ⎤R + h
|